
中 로봇은 계단을 오르는데, 韓 로봇은 못하는 이유
중국이 어떻게 로봇을 계단을 걷게 하는지 잘 모릅니다 저는 로봇 자체를 잘 모릅니다만..
동물의 운동능력학습은 계단식으로 이루어진다는 것(꼼짝도 못하다가 기다가 일어섰다가 엉금엉금 다니다가 걷다가 달리는 순서로)
그리고 이미지 트레이닝과 꿈 속에서도 운동능력의 학습이 운동할때와 동일한 프로세스와 기관에서 진행된다는 겁니다
딥러닝처럼 따로 학습시켜서 적용하는 것이 아니라 실시간으로 입력과 상태와 출력이 계속 업데이트 된다는 겁니다
지금 문제는 로봇에 엔비디아 젯슨 오린 같은거 붙여서 딥러닝으로 짧은 주기의 재학습을 통해서 환경에 따른 엑추에이터 제어를 학습과 지능적 운동의 중추로 사용하고 있다는 겁니다. 에너지도 너무 많이 먹고(3~4시간밖에 못 버팀) 문제는 재학습 주기에 따라 갑자기 환경이 바뀌는 순간 적응이 안되고 계단을 올라가지 못하는거고 미리 vision 인식으로 계단과 신경망에 맞는 가중치로 바꾼다 하더라도 그 가중치라는 것이 계단마다 최적값이 다 다르기 때문에 매우 어려운겁니다
딥러닝은 운동을 학습하더라도 학습하는 프로세스(심지어 학습 최적화 CPU/GPU, 추론 CPU/GPU 따로 쓰죠) 따로고 실행하는 프로세스도 따로라는 것이 문제이기도 하고요
그 간극을 메워줄 새로운 비미분계열의 AI가 나올겁니다
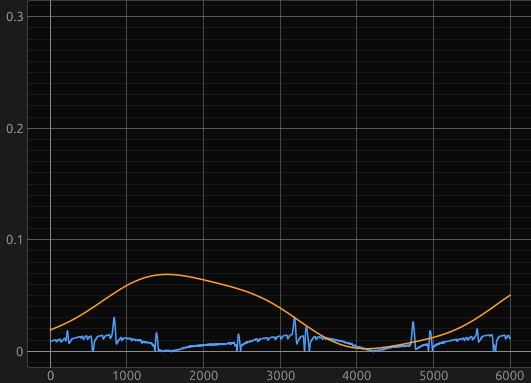
위의 오렌지선은 PID미분계산입니다(현재 엑추에이터 제어로직)
파란선은 비미분계열AI모델입니다. 비미분계산이라서 질질 끌리는 것이 없어요
로봇이 계단을 올라가려면 우선 DL의 vision 인식으로 아 저기 계단이 있네 계단에 맞는 엑추에이터 제어 가중치로 바꿔야겠다 미리 준비하는 겁니다
그런 다음 첫번째 계단을 밟아봅니다. 이때 실제로 이 계단의 높이, 미끄럼, 안정도, 경사를 비미분AI모델이 실시간으로 파악하고 두번째 세번째 계단을 올라가면서 실시간 학습 및 적응으로 최적의 가중치와 임계치를 즉시 만들어서 계단을 올라가야 됩니다